Продолжаем изучение зарождающейся новой теории управления велосипедом.

Такого бреда, как сейчас, вы не прочтете ни в одной статье газеты или научного журнала!
Как было показано мною раньше в "херасе курсовой" (см. пост #12648) есть существенное различие в управлении фикса и мультиспида.
Рассмотрим это различие более детально на примере трех систем управления велосипедом:
Схема №1) Полуавтоматическая незамкнутая система управления шоссером (Рис.1):
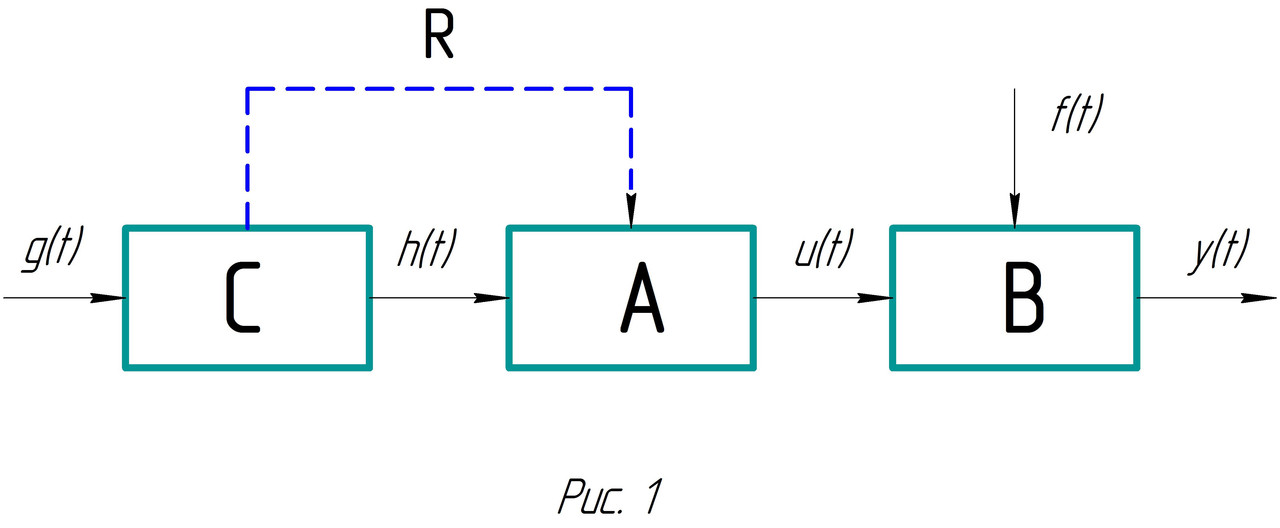
Схема №2) Автоматическая незамкнутая система управления синглом (с обгонной муфтой) (Рис.2):
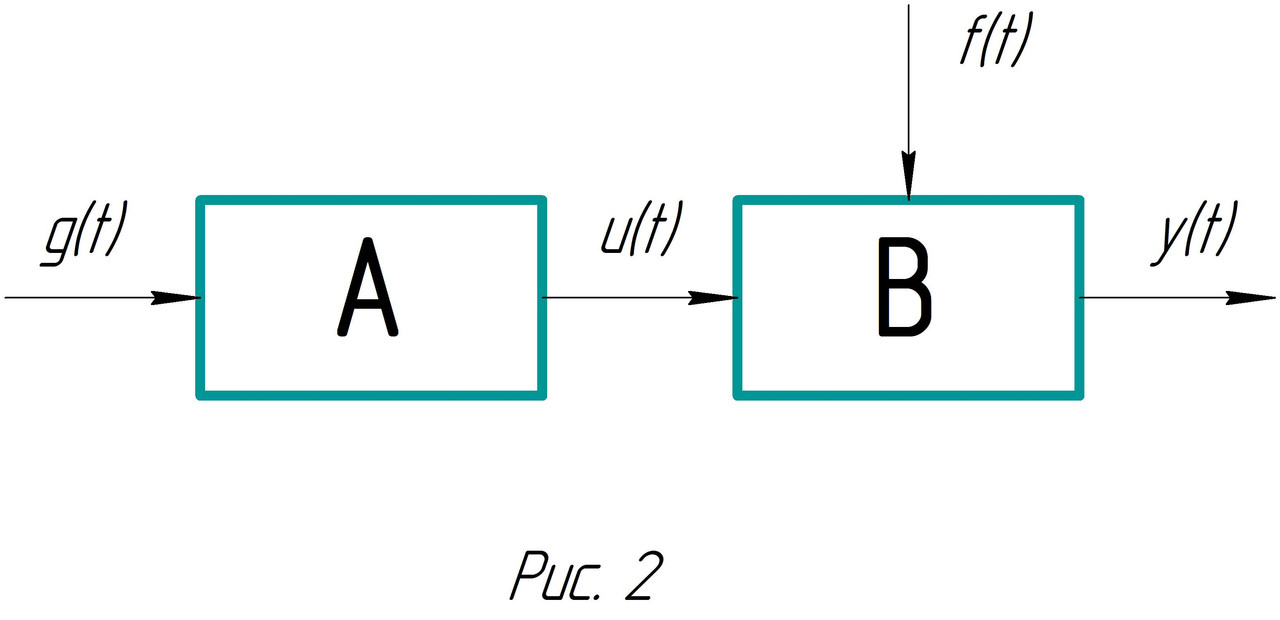
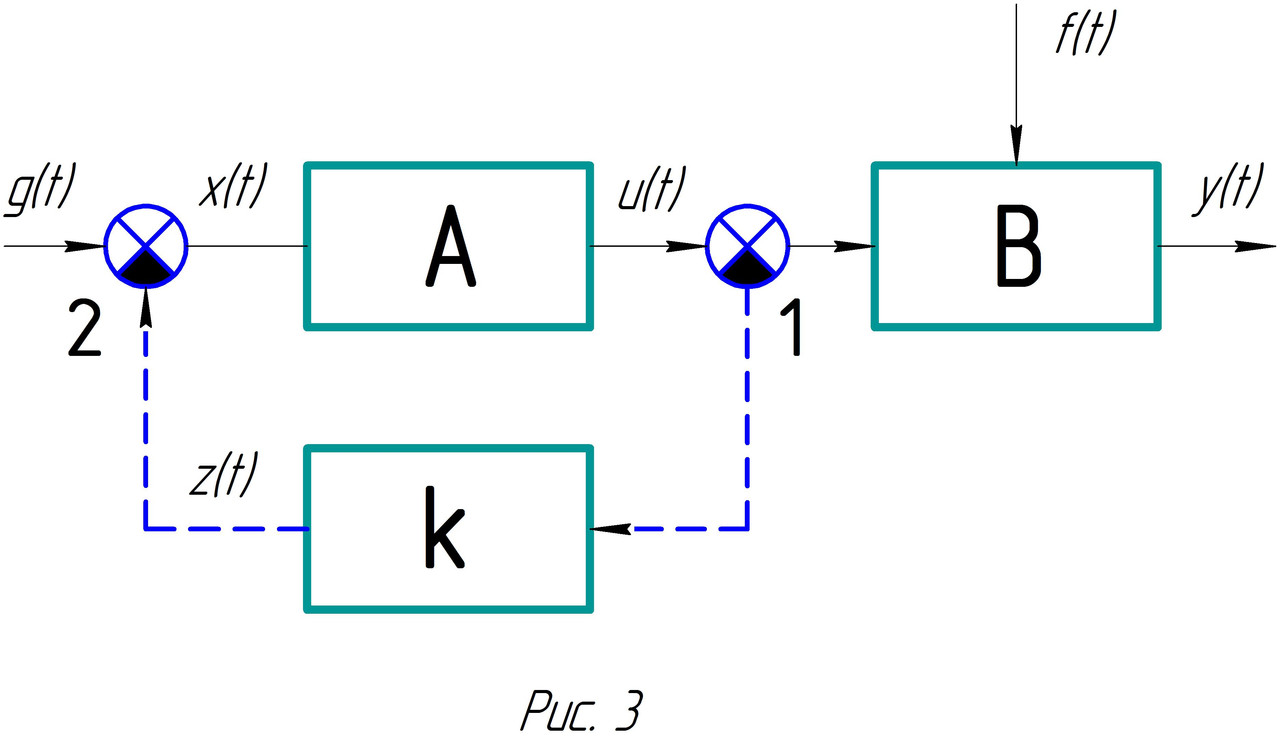
Схема №3) Автоматическая замкнутая система управления фиксом (Рис. 3):
Небольшие пояснения.
Схемы разбиты на ряд звеньев, где звено А: - исполнительное устройство (трансмиссия),
звено В - управляемый объект (велосипед),
звено С - задающее устройство (ручные переключатели скоростей на шоссере),
K - обратная связь (жесткая трансмиссия фикса).
Величины:
g(t) - задающее воздействие (в нашем случае это педаляж или каденс, как кому нравится),
y(y) - управляемая величина (скорость велосипеда),
f(t) - возмущающее воздействие (уклон трассы, состояние дорожного покрытия, ветер),
u(t) - результирующее управляющее воздействие на управляемый объект,
z(t) - воздействие обратной связи с коэффициентом передачи k,
x(t) - суммарное воздействие задющего воздействия и воздействия обратной связи,
h(t) - преобразованное воздействие (посредством ручных переключателей R на шоссере).
Цифры:
1 - блок ответвления (ведущий вал кареточного узла),
2 - блок сложения (ведомый вал заднего колеса фикса).
Вот как-то так получилося.

В процессе работы систем управления величины g, y, f, u, z, x, h меняются во времени.
Динамика преобразования величин описывается некоторыми уравнениями (или экспериментально снятыми характеристиками).
Совокупность уравнений и характеристик всех звеньев описывает динамику процессов управления во всех системах в целом.



Сообщение от Kraliv



 Ответить с цитированием
Ответить с цитированием

")

