Не катал -дцать лет и вот купил я вел в порыве интереса, захотел попробовать новый формат, и мои ожидания оправдались. Откатал примерно 250-300км, вот думаю может пора перевернуть колесо, попробовать фикс?)

|
|
|
|

Не катал -дцать лет и вот купил я вел в порыве интереса, захотел попробовать новый формат, и мои ожидания оправдались. Откатал примерно 250-300км, вот думаю может пора перевернуть колесо, попробовать фикс?)
4ecTHoK, если покатать, фривил наверное лучше.
Операция не слишком сложная, можно и попробовать, не понравится- сделать, как было.Сообщение от 4ecTHoK

Да сперва чему там нравиться, кто-то тут говорил что возвращается к свободному ходу дабы не быть рабом велосипедахочу курю пачку в день а захочу так две. Фикс всё таки совсем на раслабоне ездить не даст это не кастрированный фривилом мул у фикса характер есть.
Продолжаем изучение зарождающейся новой теории управления велосипедом.
Такого бреда, как сейчас, вы не прочтете ни в одной статье газеты или научного журнала!
Как было показано мною раньше в "херасе курсовой" (см. пост #12648) есть существенное различие в управлении фикса и мультиспида.
Рассмотрим это различие более детально на примере трех систем управления велосипедом:
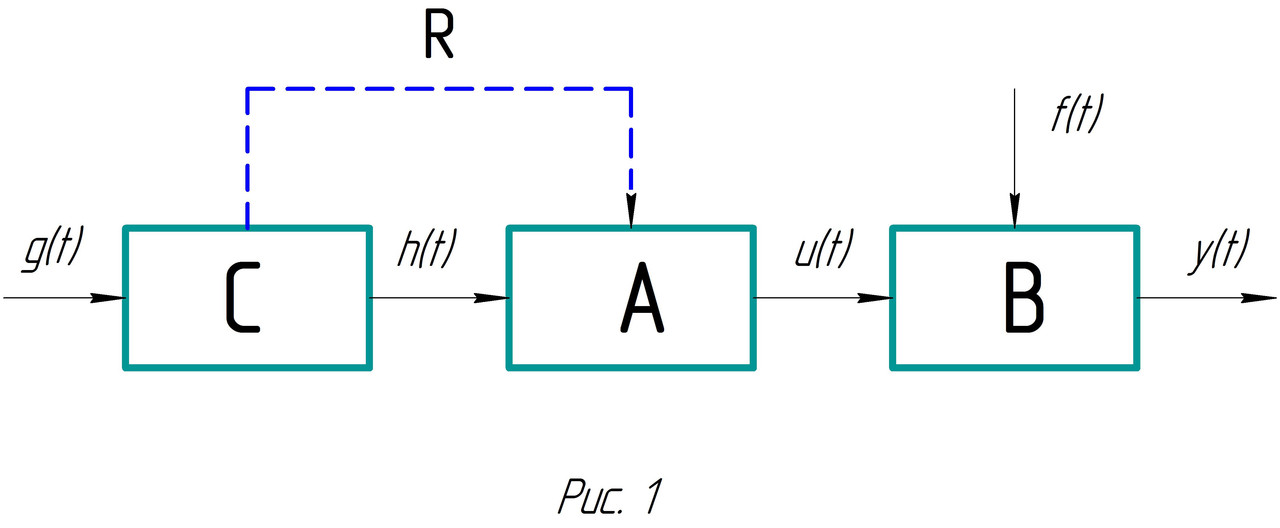
Схема №1) Полуавтоматическая незамкнутая система управления шоссером (Рис.1):
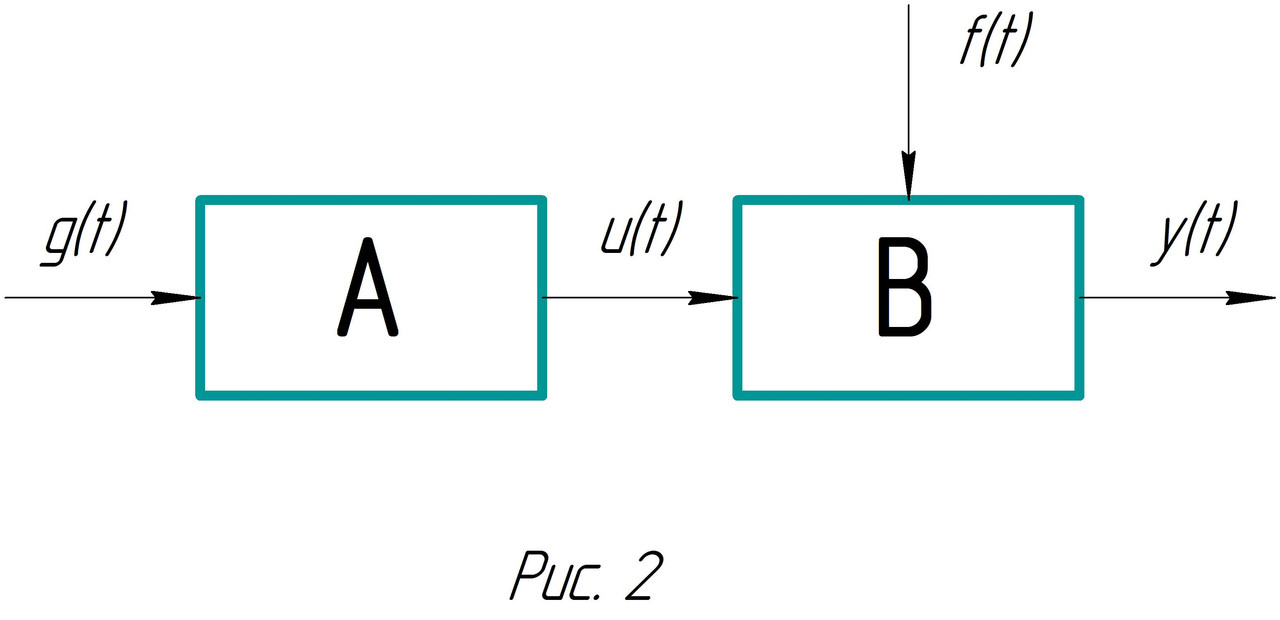
Схема №2) Автоматическая незамкнутая система управления синглом (с обгонной муфтой) (Рис.2):
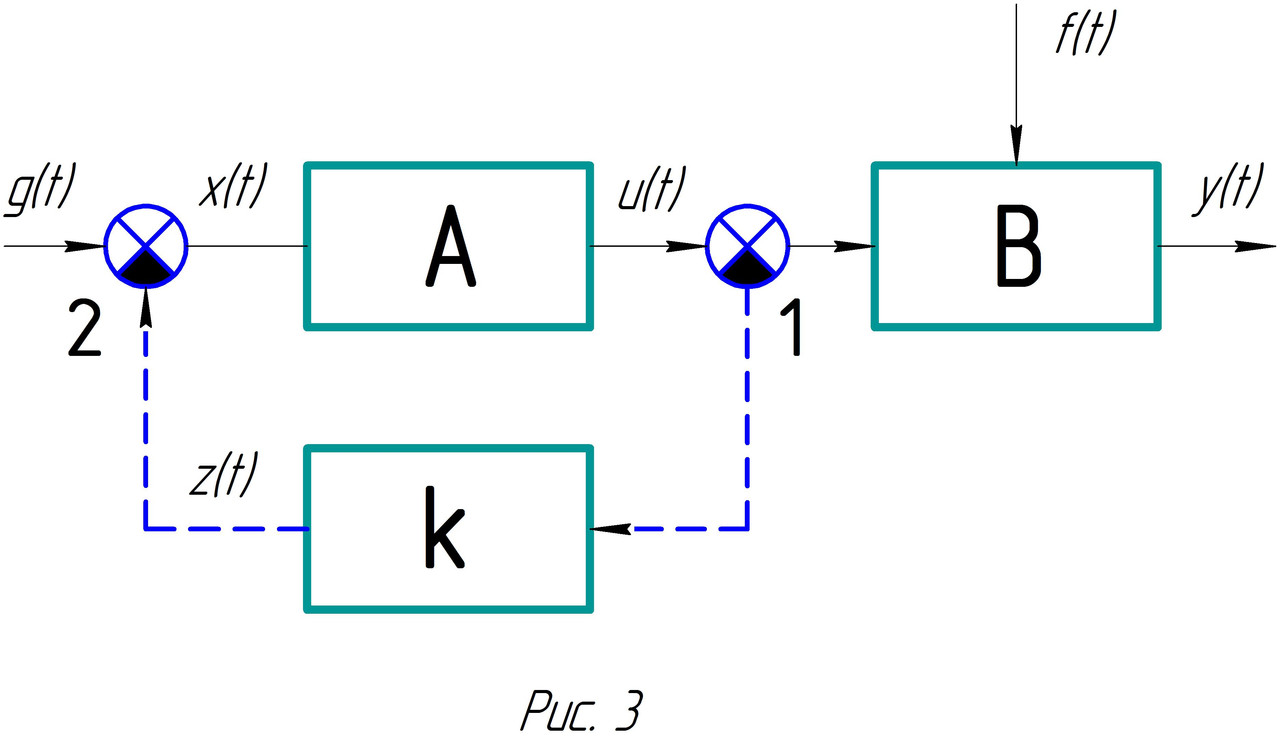
Схема №3) Автоматическая замкнутая система управления фиксом (Рис. 3):
Небольшие пояснения.
Схемы разбиты на ряд звеньев, где звено А: - исполнительное устройство (трансмиссия),
звено В - управляемый объект (велосипед),
звено С - задающее устройство (ручные переключатели скоростей на шоссере),
K - обратная связь (жесткая трансмиссия фикса).
Величины:
g(t) - задающее воздействие (в нашем случае это педаляж или каденс, как кому нравится),
y(y) - управляемая величина (скорость велосипеда),
f(t) - возмущающее воздействие (уклон трассы, состояние дорожного покрытия, ветер),
u(t) - результирующее управляющее воздействие на управляемый объект,
z(t) - воздействие обратной связи с коэффициентом передачи k,
x(t) - суммарное воздействие задющего воздействия и воздействия обратной связи,
h(t) - преобразованное воздействие (посредством ручных переключателей R на шоссере).
Цифры:
1 - блок ответвления (ведущий вал кареточного узла),
2 - блок сложения (ведомый вал заднего колеса фикса).
Вот как-то так получилося.
В процессе работы систем управления величины g, y, f, u, z, x, h меняются во времени.
Динамика преобразования величин описывается некоторыми уравнениями (или экспериментально снятыми характеристиками).
Совокупность уравнений и характеристик всех звеньев описывает динамику процессов управления во всех системах в целом.
Но это уже будет пятничный разговор. Здесь без бутылки уже будет не разобраться.")
Чё? ??? Не Ленин ты. Где фиксы крестьянам, хромоли рабочим? Где пропаганда? Короче не понял ничего, типа сори.
Любишь на фиксике кататься?
Люби и педалечки крутить!
А чо крутятся то они все время?
Потому что подключены в фиксо-трансмиссию посредством обратной связи.
Теперь то хоть понял?
Последний раз редактировалось myxo; 02.08.2018 в 20:21.
Мне тоже все вокруг (ну, кроме обитателей этой ветки) предсказывали, что максимум через неделю, я переверну колесо обратно на фривил. Прошло уже года полтора... Не переворачивается чо-та.
Онанизм тоже затягивает.
Эту тему просматривают: 1 (пользователей: 0 , гостей: 1)

 Ответить с цитированием
Ответить с цитированием